
| 作品:邵立民之未来战士 | ||||||||
|---|---|---|---|---|---|---|---|---|
| http://jczs.sina.com.cn 2006年09月12日 18:03 新浪军事 | ||||||||
 点击此处查看全部军事图片   
“未来战士”变体扑翼无人战斗机思路说明 “未来战士”主要技术数据:
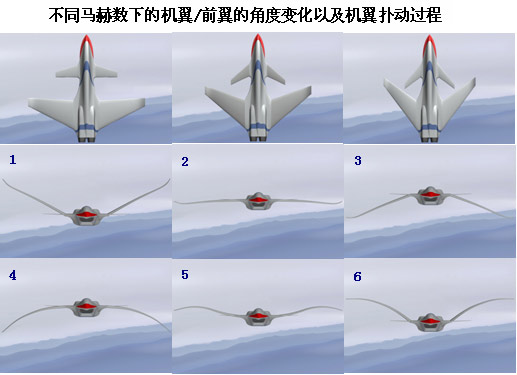
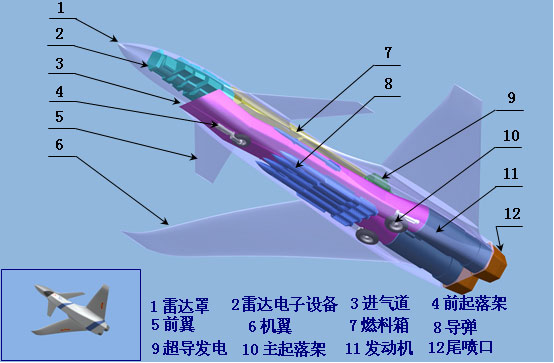
外形尺寸: 机长:12.40m 机高2.36m 翼展12.88m(最大) 前翼翼展5.94m(最大) 主轮距3.40m 前主轮距4.85m 重量: 空重4200kg 最大起飞重量10500kg 最大燃油3600kg 最大有效载荷3200kg 性能: 无加力最大巡航速度Ma 2.0 最大速度Ma2.85 实用升限28000m 作战半径1100km 最大转场航程4500km 最大机动过载25g 最小转弯半径0米(原地转向) 最大转向速率120deg/sec 根据目前战斗机发展趋势,可以设想,未来空战中世界主要国家的作战飞机都已具备了较强的超视距空战能力、隐身性、超音速巡航性能和高机动性。由于双方战机都具有隐身性,交战双方发现对方的距离大大缩短,同时又都具有一定的超音速巡航能力,更加压缩了交战空间,因此作为一种与超视距空战并存的重要交战模式,近距格斗空战将作战飞机机动性能的要求提升到更高层次。 根据以上对未来空战环境的分析,这里提出了一种变体扑翼无人战斗机方案,并将其命名为“未来战士”。“未来战士”以夺取战区制空权为主要作战目的,在保持高水平的超视距空战能力、隐身性和超音速巡航的同时,也拥有优异的机动性,具备超短距起降和多任务能力。作为一种无人驾驶战斗机,“未来战士”彻底摆脱了飞行员生理承受极限对飞机机动性的束缚,同时还可降低战场伤亡和训练成本。 “未来战士”综合利用变体技术、电磁特征与构型实时管理技术以及仿生扑翼技术等三项创新技术以全面提高战斗机综合性能。 变体技术以具有感受外部环境和控制变形的新型“智能”材料为基础,其中“智能”材料蒙皮结构由四层材料组成,其中第一层为基层,主要起安装和固定作用;第二层可控变形层,该层类似于压电材料,可感受气动载荷转并换成电信号,也可感受外加控制电压以产生特定变形;第三层为电磁辐射接收与屏蔽层,该层材料以可控频段隐身吸波材料为主,材料中的特殊微小单元可感受雷达电磁辐射的强度和波长,并传送给中央控制系统,起到类似于雷达告警器的作用;第四层为防热层,以满足超音速飞行时的防热问题,同时具有良好的透波性,以使第三层接收与屏蔽雷达波。 以“工”字型“智能”材料梁垂直方向的控制变形为例,“工”字梁的上下部分为变体材料,中间腹板为弹性材料。当给上下变体材料施加不同控制电压后,上变体材料延伸,下变体材料收缩,最终造成该梁整体向下弯曲,机体其它结构的变形原理与之类似。 电磁特征与构型实时管理技术以最新多目标优化算法、先进飞行控制理论和神经网络控制技术为基础,以机载中央综合控制系统为核心,通过光纤传输总线收集变体材料和其它传感器的气动载荷、雷达电磁辐射信息,结合预定飞行任务类型在飞行过程中进行实时优化计算,根据计算结果并通过光纤传输总线控制飞机变体结构进行变形重构,以得到最优的气动外形和最小的RCS。 仿生扑翼技术以模拟自然界中鸟类的飞行方式为基础,利用新型电致动合金材料驱动机翼扑动,并结合上文提到的变体控制技术实现机翼的柔性变形,扑翼飞行控制系统根据各传感器提供的速度、加速度以及外部环境的变化,协调控制机翼和前翼扑动飞行。利用仿生扑翼技术和推力矢量技术可使飞机在亚音速飞行中实现机翼(前翼)扑动和柔性变形,从而使战机像鸟儿一样实现空中悬停、原地转向、倒飞、侧飞等超常规机动飞行和超短距起降,可迅速改变机头指向、规避来袭导弹和显著降低对起降场地的限制。仿生扑翼技术可从根本上提高战斗机的机动性和敏捷性,极大地扩展了飞行包线的低速区域,因此必将给近距空战带来革命性的变化。 总体说明 “未来战士”采用翼身融合的无垂尾鸭式布局,机身由变体材料以及先进复合材料构成,具有结构重量小、强度高 、隐身性强的特点,同时可以实现控制变形,以提高飞行性能和减小激波阻力。 机翼和前翼采用变体和电致动扑翼材料实现柔性变形和扑动,在起降、近距空战等低速情况下机翼、前翼采用扑翼飞行方式,超音速巡航时转换为固定翼方式,并且机翼前掠角和前翼后掠角可根据马赫数进行调节,以满足配平及稳定性要求,并可减小波阻和声爆的产生。 通过变体技术、主动增稳控制及构型实时管理技术可实现机翼扭转、变弯度、变前掠角等动作,因而可以省去襟翼、副翼、升降舵、方向舵、阻力板等操纵面,既可在不同飞行状态下提供优良且一致的稳定与操纵能力,又可减小重量、阻力和RCS,另外系统的复杂性和故障率也可显著降低。 “未来战士”采用两台高推重比低耗油率的推力矢量涡轮发动机,该发动机既可在低速时以涡轴方式工作,来驱动超导发电机提供机翼和前翼扑动、控制所需电力,又可在超音速飞行时以常规涡扇方式工作,以得到高速飞行所需大推力。 “未来战士”不同于目前飞行器动力系统的另一大特点是可采用全电力飞行方式,仅依靠储存在飞机内部的电能驱动机翼和前翼扑动飞行以及控制结构变形,主发动机处于休眠状态,全机几乎没有强烈红外辐射信号产生。全电动方式飞行方式主要是为了降低红外信号和主发动机声音信号,可有效降低红外制导导弹的效能,并可像夜空里的蝙蝠一样悄无声息的隐蔽飞临目标区。全电力飞行所需电能完全储存于具有蓄电池功能的机体结构材料中,无需额外的蓄电池,充电过程可在地面完成,也可依靠超导发电机在空中多次进行。 采用变体材料的进气道系统可以根据不同的马赫数和飞行姿态迅速调整进气道唇口形状、进气道内壁构型,以得到高总压回复系数和较小的气动阻力,而且结构简单、重量轻。 为了摆脱对传统石油燃料的依赖,“未来战士”以可常温安全储存并可再生的液态甲烷为燃料,并将其存储于机身内部的燃料箱中。 “未来战士”采用前三点式起落架,滑跑起降。由于采用鸭式布局和扑翼技术,故起飞距离可以缩短到180米以内;着陆接地后,前翼、机翼前缘向下扭转,起到类似减速板的作用,故着陆滑跑距离可以降低到150米以内。在起降过程中,为防止机翼扑动时翼尖离地过近,可以限制下扑幅度,起落架可以伸长95%,以增加离地高度。 “未来战士”的机载系统组成如附图所示,该系统以集成了飞控、火控、导航、通讯等多种功能的中央综合控制系统为核心,以容量大、抗干扰性强的光纤传输信号,同时装备大功率有源相控阵雷达、远/近距光电探测装置、任务管理计算机、远程信息交换与管理系统。 随着人工智能控制、先进传感器等技术的发展,实现战斗机的自主飞行和自主交战将成为可能,但对战场总体态势的把握、采用何种进攻战术、进出战场时机的把握等方面是不可能做到自动化的,因此无人机在整个作战过程中必须受到空、地控制人员的监视和控制。 无人驾驶的“未来战士”通过C4I系统实现信息传递与控制,该系统以高容量、高速度的通讯数据链为纽带,将无人战斗机、空/地控制与跟踪站、预警机、地基雷达、卫星等平台有机的联系在一起。控制人员可根据无人战斗机本身以及其它平台提供的信息实现对战场总体态势的把握,制定相应的战术,并通过上行数据链将相关控制信息传递给无人战斗机,由无人机自主对敌对目标进行搜索、识别并最终进行攻击。C4I系统可引导“未来战士”单机进行渗透、侦察作战,也可控制多机集群协同作战,以弥补传感器、载弹量、实时决策等方面的不足。如果遇到无法克服敌方强烈电磁干扰或战场虚拟显示与控制系统故障,“未来战士”自动转入自主防御态势,并在最短的时间内选择最近的己方机场着陆。 “未来战士”在机身内部的弹舱中可混合携带6枚中、近距空空导弹进行空战,也可携带各型精确制导武器进行对地打击。为增加任务灵活性,“未来战士”通过在腹部携带不同功能的隐身保形吊舱实现来实现侦察、电子干扰、伙伴空中加油等多种功能。 变体技术、电磁特征与构型实时管理技术、仿生扑翼技术的发展不仅可以使作战飞行器设计取得革命性的进步,同时在民用领域也有相当广阔的应用前景。未来大型超音速客机如果采用机翼扑动技术和变体材料就可以大大提高气动效率,减小燃料消耗,有效减小波阻和声爆的产生,以符合越来越苛刻的环保和节能要求,优良的短距起降能力也可使大型客机摆脱大型机场的束缚。可以设想,随着科学技术的发展,类似“未来战士”的未来飞行器将会彻底摆脱当代飞机留给人们的机械、僵化、无“知觉”的印象,变体和仿生扑翼技术的应用将会给未来飞行器的设计、制造和使用带来翻天覆地的变化。 相关专题:中国创新杯第二届未来飞行器设计大赛 |
| 舰船知识 > 我军新闻> 中国创新杯第二届未来飞行器设计大赛 > 正文 |
|
|
|
|
Copyright © 1996-2006 SINA Corporation, All Rights Reserved |