新浪军事编者:为了更好的为读者呈现多样军事内容,满足读者不同阅读需求,共同探讨国内国际战略动态,新浪军事独家推出《深度军情》版块,深度解读军事新闻背后的隐藏态势,立体呈现中国面临的复杂军事战略环境,欢迎关注。
近日,西北工业大学官方网站在综合新闻一栏报道称,针对空间失效卫星的捕获难题,该校首次提出并发展了一种带系绳、可远距离抓捕空间非合作目标的空间绳系机器人系统,解决了非合作目标远距离识别、跟踪、逼近、抓捕、辅助稳定、拖曳等一系列关键技术难题。
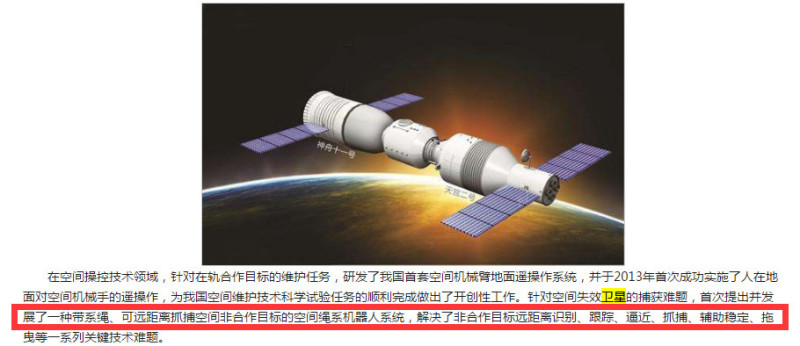 (图)西北工业大学官网报道截图
(图)西北工业大学官网报道截图
从这些信息来看,中国不仅有借助机械臂对空间卫星进行抓捕的技术,还有采用空间绳系机器人技术进行抓捕的技术。这将对美国形成空间技术优势,为提升中国航天技术的优越性,在未来的高新空间技术中能有一席之地,提升中国军事实力,保证人民安全等方面做出巨大贡献。
在这则信息曝光前,外界普遍认为,中国在轨抓捕技术主要是采取机械臂抓捕的模式。2016年6月25日发射的长征七号火箭上,携带了“遨龙一号”空间碎片主动清理飞行器。官方媒体曾披露称,“遨龙一号”装载了一台机械臂,将模拟在太空抓取废弃卫星和其他大块碎片,并将它们带到大气层进行烧毁。
 (图)“遨龙一号”太空机械臂
(图)“遨龙一号”太空机械臂
所谓在轨抓捕技术,是指己方受控卫星、飞船等航天器在地面辅助引导和自主引导下,运动到目标卫星等航天器所处的空间轨道,然后缓慢接近目标航天器,最终处于给定的误差范围内,在测距传感器、视觉传感器和数据运算处理器等控制系统的相互作用下,缓慢靠近目标飞行器并与其实现锁紧连接,从而与目标飞行器完全整合为一体,最终使两航天器的相对速度为零的过程。
这种技术可以基于非合作目标对接抓捕技术,开发出空间服务卫星,这些卫星可以使用对接抓捕机构捕获目标卫星,然后将目标星脱离所在轨道,或通过在轨服务技术延长其使用寿命等操作,从而完成对失效卫星的抢救维修,延长目标卫星使用寿命,创造更多使用价值。此外,对于损坏或失效的卫星,还可以将其拖离轨道,起到轨道垃圾清理的作用。
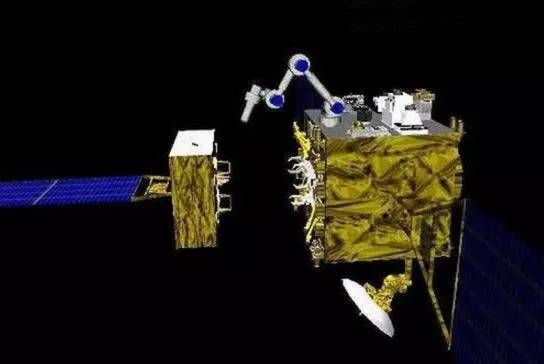
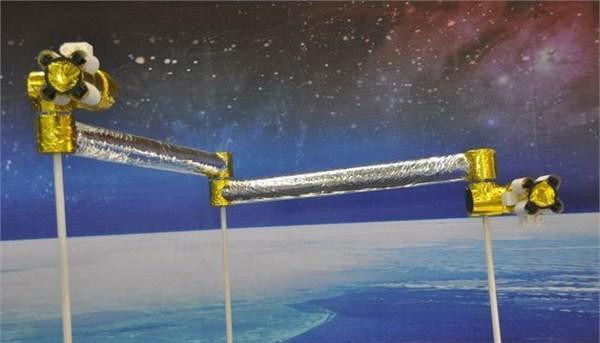 (图)国产太空机械臂
(图)国产太空机械臂
目前,西方大国均开始加强对太空领域的探索,尽最大努力占领太空重要的军事、科技战略地位,这些国家均在积极研制用于在轨卫星抓捕的无人航天器。国外卫星抓捕技术研究中典型的非合作方案包括美国FREND三机械臂+可更换执行器方案、德国DEOS的单机械臂+伸缩杆方案以及欧洲CX-OLEV, SMART-OLEV伸缩杆+插锁机构和欧空局ROGER飞网方案等。
 (图)在轨卫星抓捕技术
(图)在轨卫星抓捕技术
中国针对非合作目标的在轨卫星抓捕技术进行研发,既能够带动地面机械系统设计等相关技术的巨大进步,还能为中国空间在轨服务提供一种技术支撑,为减少中国对太空探索的资源投入、空间轨道的清洁、保证中国空间安全提供了一种全新的手段。同时,在战时中国还可以基于非合作目标卫星抓捕技术,实现对非合作卫星的抓捕,继而将敌方卫星损坏。(作者署名:迷彩派)
本栏目所有文章目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。凡本网注明版权所有的作品,版权均属于新浪网,凡署名作者的,版权则属原作者或出版人所有,未经本网或作者授权不得转载、摘编或利用其它方式使用上述作品。
新浪军事:最多军迷首选的军事门户!